Situation Awareness
空中戦や戦闘機について解説されている本や資料などを読むと、「Situation Awareness」という言葉が多用されています。略して「SA」と書かれていることもよくあります。日本語では「状況認識」という言葉に訳されることが多いようです。Situation
Awareness 「SA」とは、現在の状況を観測し、現在と近未来における自己や周囲の状況を正しく予測・認識する能力を言います。
例えば自動車の運転において、「前方の信号が黄色なのでじきに赤になるから減速しよう。」という判断もSAの一種であると言えます。(関西では黄色は加速、赤は注意して進めだそうですが、これもSAの一種と言えます)
戦闘機に置ける必勝法はFirst Look(早期発見), First Shoot(先制攻撃)であることはこれまで述べた通りですが、本来First
Lookとは単に敵を発見することだけではなく、戦場上空の状況を認識し未来を予測するといった広い意味を持ちます。このような戦場上空の趨勢を把握する能力、をSAで表します。言い換えてみれば、異常なまでに目の良いエースパイロット達はSAに特段優れていたと言えるでしょう。
今回は技術によってSAに劇的な変化をもたらした統合アビオニクスとセンサーフュージョンについて書いてみます。前回の空対空戦闘2 敵機を発見すると言うことでは、電磁波による索敵の戦いについて書きました。今回のテーマはそれをどう処理するか。という点がキーポイントです。
以下Situation Awareness(SA)なんて敵性語を使い続けるのはカッタルイし読みにくいので、以下の本文では全て「状況認識」という言葉に置き換えて進めたいと思います。
「状況認識=SA」という用語は、航空軍事を語る上でよく用いられます。一般的な単語としてではなく、特別な意味をもつ単語として覚えておくとシアワセになれるかもしれません。
複雑化する状況認識
当たり前ですが、レーダーやIRST(赤外線捜索追尾装置)などで得られた情報は、パイロットへと伝達しなくてはなりません。
適当な写真がなく、ゲームの画面で申し訳ないのですが...

上のCGはF-15Eストライクイーグル前席の計器類です。3基のMFD(多機能ディスプレイ)に注目してください。
左はレーダー画面で、レーダーで得られた情報を表しています。
右は電子戦(TEWS)関連画面で、レーダー警戒受信機(RWR)が受信した脅威情報を表示しています。
下は慣性航法装置や元々コンピューターにプリセットされている航法情報です。
以上のように、第4世代戦闘機は各種センサーごとに得られた情報をそれぞれ独立したコンピューターで処理し、計器に表示しています。半世紀前までは「目」しかセンサーが無かったのに対し、表示される情報が多すぎてクラクラしてきますね。現代戦フライトシミュレーターに慣れた人や、本職の戦闘機パイロット以外はそれぞれの表示が何を意味しているのかサッパリ分からないと思います。そう、複数の計器をチェックして状況認識情報をを引き出さなくてはならない現代の空中戦は非常に複雑なのです。
しかし、それでも上のF-15Eには直接交戦に必要となるセンサーは、レーダーとレーダー警戒受信機のたった2個だけです。
古い話ですが興味深い例があります。1973年の第4次中等戦争において、イスラエル空軍のF-4EにはRHAWS(レーダー警戒受信機...上のF-15Eの右側計器のようなもの)が搭載されていました。RHAWSは、自機に照射されているレーダー波を探知し、パイロットや後席ナビゲーターに警告情報を表示するという、当時としては珍しかったシステムで、F-4Eは高い生存性を誇るはずでした。しかし、RHAWSは全く役に立ちませんでした。何故でしょう?
答えは簡単です。イスラエル空軍の敵であったエジプト陸軍はバカみたいに大量の地対空ミサイルや、その照準・索敵レーダーを配備したからです。ソ連の地対空ミサイル配備基準の2-3倍とも言われている濃密な防空網でした。
F-4EのRHAWSには何十というレーダー波を検知し、そのまま表示されていたため、搭乗員は表示されている脅威情報のうち、本当に必要な情報が分からなかったです。複雑で、多すぎる情報は、かえって状況認識の邪魔になってしまったのです。
センサー融合による劇的な「状況認識」の向上
最近の戦闘機、例えばF-35ライトニングIIなどはレーダーやESM(レーダー警戒受信機)の他にEOTS・EODAS、それにデータリンクなど、さらに情報を得る手段が増えています。F-35のパイロットは5個もの情報を個別に見なくてはならないのでしょうか?
これは訓練を積んだパイロットでも不可能なことです。1秒が生死を分かつ空中戦において、そのような余裕はとてもありません。
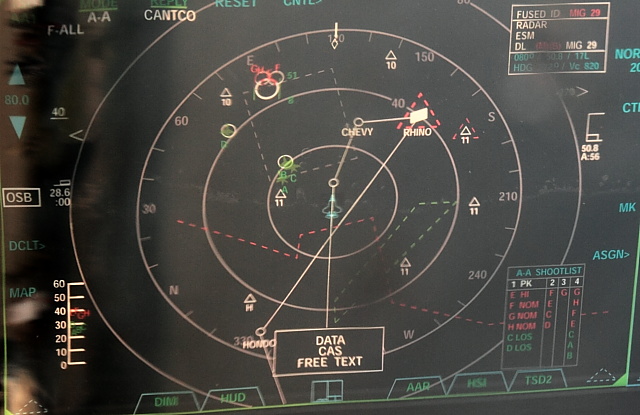
しかし、そうはなりませんでした。写真はF-35モックアップ機の状況認識ディスプレイです。
レーダー、レーダー警戒受信機、データリンク、EOTS、EODASにて得られた情報や、航法情報の全てがこの一枚のディスプレイに表示されます。素人が見ても先ほどのF-15Eに比べると、とても理解しやすいとは思いませんか?
自機を中心に20,40,60,80マイルの同心円で区切られ、およそ20マイル左前方に赤で表示された3機の敵編隊が見えます。敵機にはそれぞれアルファベットのコードが振られ、右下の射撃リストに加えられています。白い線は予定航路です。 予備知識が無くてもこれだけ理解できてしまいます。もちろん、これらの情報は編隊内・外の戦闘機とデータリンクで共有されています。
そして状況認識ディスプレイには、イスラエル空軍のF-4Eの例のように情報を過度に表示してはいけません。パイロットが本当に必要としているもののみが自動的に選別されています。
このように一枚の状況認識ディスプレイに表示することをセンサー融合(センサーフュージョン)と呼びます。(ココ、試験に出ます)
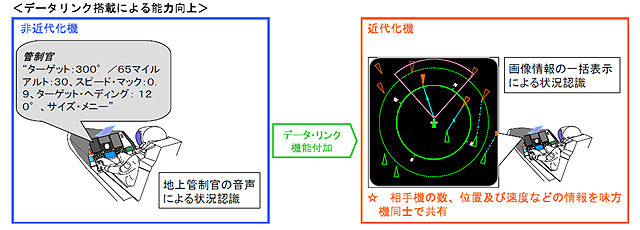
上の図は平成21年度防衛省予算の概要から。
アメリカ空軍が実施した試験によると、上図左のような従来機と、右の機のような将来機ではキルレシオに2倍もの差がつくという結果が出ました。センサー融合はパイロットの状況認識向上に革命的な変化をもたらしました。こうした技術は今後の戦闘機の標準的な能力となるでしょう。

上の写真は現在韓国で選定中のFXを睨んだF-15K「スラムイーグル」のコックピットモックアップです。
中央のパネルはホンモノの計器で、リアルタイム稼働しています。
ボーイングは「サイレントイーグル」化したF-15Kの追加生産を売り込んでおり、イスラエルのエルビットシステムズは一枚ディスプレイのレイアウトを展示していました(2009年ソウルエアショーにて)。
右側の状況認識ディスプレイは、まるでエースコンバットなど、ゲームのレーダー画面のように見えませんか? 小学生でも理解できるよう設計されているゲームのレーダー画面に近いと言うことは、それだけパイロットに高い状況認識力をもたらすということでもあります。
前回の空対空戦闘2 敵機を発見すると言うことの最後にシステムの力によってパイロット全員が坂井三郎になれると、書きました。
その言葉の意味は、こうした先進的なセンサーで得られた情報を融合し、状況認識ディスプレイに表示することによって、エースパイロットの状況認識力を得られる。ということなのです。
センサー融合と統合アビオニクス
センサー融合を実現するには統合アビオニクスが必須です。
統合アビオニクスとは、それまで個別のコンピューターで処理していたものを、一つのコンピューターによって処理を行うことを意味します。小さな戦闘機に搭載可能なアビオニクスの量はきわめて限られていますから、一つで処理可能と言うことは優れた利点です。しかし、統合アビオニクスは弊害ももたらしました。
ソフトウェアの開発にとてつもない時間が掛かり、修正も容易ではないと言うことです。
統合アビオニクスについては、いずれまた機会をもうけて書きたいと思います
(更新日:2010年3月6日)
目次へ戻る